
Текст публикуется в переводе, автор оригинальной статьи Justin Svegliato.

Построение маршрута
Как вы уже догадались, важнейшая составляющая робота – его способность планировать маршрут от одного места к другому с учетом карты окружающей среды. Зачем это нужно? Например, робот перемещается через комнату, чтобы доставить посылку или сопроводить человека в здание. В случае, когда роботу требуется добраться от начальной точки до конечной, чтобы выполнить задание, наш аппарат разрабатывает план перемещения.

В прошлом я написал несколько постов с красочными диаграммами и длинными объяснениями. Признаться, поскольку такие посты требуют много работы, в итоге ничего так и не было опубликовано. В моих планах писать посты без лишнего материала, более грубые и непринужденные. Мне не только легче написать пост, который укрепит собственное понимание концепции. Я также уверен, что такая подача материала будет столь же информативной без "колокольчиков и свистков", которые присутствовали в других моих постах. А теперь вернемся к нашей теме.
Некоторые тонкости, которые стоит держать в уме:
- Планирование движения должно работать на роботе. К примеру, робот по плану совершает поворот под острым углом, что технически невозможно, исходя из его функциональности (как и у автомобиля). Следовательно, подобный маршрут неприемлем.
- Чем ближе к оптимальному, тем лучше. Безусловно, хорошо найти любое движение, в процессе которого робот из начальной точки A достигнет конечной точки B. Однако этого, к сожалению, недостаточно. Мы хотим получить более эффективный результат работы. Это не только поможет роботу выполнить задачу как можно быстрее, но и сэкономит драгоценный заряд батареи.
- Разумеется, маршрут исключает столкновения со стенами. Роботы – дорогое развлечение, а поломка никогда не хороша. Один только мой маленький робот обошелся более чем в тысячу долларов.
Какой алгоритм подойдет для нашей цели?
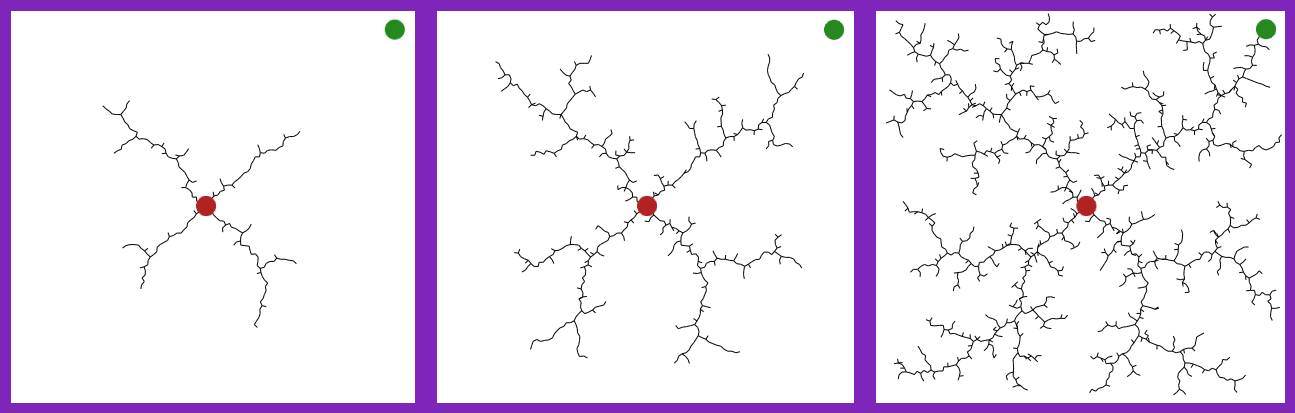
Из удовлетворяющих нашим условиям алгоритмов наиболее известным является Быстро Исследуемое Случайное Дерево (Rapidly-exploring Random Trees – RRT). Поскольку одна картина стоит тысячи слов, давайте посмотрим на диаграмму ниже. Предположим, что задача робота – добраться от начальной точки (красная точка) до цели (зеленая точка) по стандартной карте, без каких-либо препятствий. Начнем с дерева, корневой узел которого – начальная позиция робота. После этого постепенно наращиваем дерево. Каким образом? Возьмем кучу случайных образцов карты, создадим новый узел для каждого и вставим его в дерево. Как только в дереве появится достаточно близкий к целевому положению робота узел, наша работа по планированию закончена.
Детализация RRT
Знаю, эта формулировка проблемы кажется туманной. Давайте добавим к грубой идее некоторые детали. Для начала предлагаю рассмотреть каждый параметр, который мы будем передавать в RRT:
- Разделенная на области карта окружения с препятствиями и без них. Она будет выглядеть как показанная выше, где область с препятствиями – это все, что окрашено в серый цвет, а область без препятствий – окрашенное в белый пространство.
- Стартовая позиция робота в окружающей среде – красная точка на карте.
- Область цели: цель движения робота в среде – зеленая точка на карте.
- Количество итераций, выполняемых RRT.
Алгоритм
Давайте рассмотрим каждый шаг алгоритма. Сначала мы инициализируем пустое дерево. Затем мы вставим в него корневой узел, представляющий начальную позицию (на этом этапе у нас будет единственное дерево с одним узлом). Мы будем повторять эти шаги, пока не закончим количество итераций или не достигнем цели (в зависимости от того, что наступит раньше).
- Выберите случайную позицию относительно препятствий в области карты.
- Создайте связанный со случайной позицией узел.
- Найдите в дереве узел, который находится ближе всего к случайной позиции.
- Рассчитайте маршрут относительно случайной позиции до позиции узла. Маршрут, который будет выполним для робота.
- Перейдите к следующей итерации, если в выбранном пути робота возникнут проблемы.
- Вставьте связанный со случайной позицией узел в дерево с узлом (ближайшим к нему) в качестве родительского узла.
- Верните дерево, как только случайная позиция окажется на некотором расстоянии относительно целевой позиции.
Можно ли повторно использовать дерево для новых целей на той же карте?
Конечно! Если в дереве возле новой цели уже присутствует узел, то ситуация под контролем. Однако, в случае, если рядом с новой целью еще ничего нет, мы продолжаем выборку, пока не найдем узел рядом с нашей целью. До тех пор, пока окружение не изменится, строим идентичное дерево для новых мест расположения цели.
Без лишних слов, вот вариант алгоритма для RRT:
function RRT(map, startPosition, goalRegion, numIterations):
tree = initializeEmptyTree()
insertRootNode(tree, startPosition)
for i = 1 to numIterations:
randomPosition = sample(map)
randomNode = createNode(tree, randomPosition)
nearestNode = findNearestNode(tree, randomPosition)
path = calculatePath(nearestNode, randomNode)
if (hasCollision(map, path)):
continue
insertNewNode(tree, nearestNode, randomNode)
if (randomPosition is within goalRegion):
return tree
return tree
RRT и оптимальность
Еще один момент, который важно осветить! Хотя это планирование будет работать на рассматриваемом роботе и избегать препятствий, будет ли оно оптимальным? К сожалению RRT не гарантирует этого. Не спешите расстраиваться! В следующих статьях цикла я расскажу о RRT* – улучшенной вариации RRT, которая в конечном итоге генерирует оптимальный путь.
Комментарии